机器人在成品袋装码垛上的应用越来越广,越来越多地被市场认识,它有其他设备无法比拟的优势,近年来在欧美、日本等发达国家的应用已超过 70% 以上,在日本码垛机器人在码垛市场的占有率超过了90%,绝大数码垛作业由码垛机器人完成。
码垛机器人能适应于纸箱、袋装、罐装、箱 体、瓶装等各种形状的包装成品码垛作业。
从效率上说,码垛机器人 不仅能承担高负重,而且 速度和质量远远高于人工。 目前以四轴搬运机器人为 例,根据负重的不同,分 为 100Kg-700Kg 多种型号。 其在直线运动时可达到 2500mm/s 的最大运动速度; 搬运能力最高能达到 1600 次 / 小时。
从精度上看,每一台码垛机器人都有独立的控制系 统,极大地保证了作业精度,且重复精度可达±0.5mm,完全可以满足物 流码垛作业的定位要求。


码垛机器人虽然前期投入较高,但是却能达到边际成本效用最大化,且各家机器人都在 为客户的成本控制都在产品从稳定性上讲,目前最先进的码垛机器人已经达到 5 轴和 6 轴, 通过相应的科学、合理的刚性机械本体设计,使得机器人本体不仅适应高负重、高频率 的码垛作业,还能适应食品快餐行业分拣繁琐,灵活性高的作业要求
在控制网络方面,码垛机器人既可以通过“点对点”通信,也可以通过不同的国际标准 总线接口(例如:CC-Link、PROFIBUS、Device Net 等)或者以太网,方便、快捷、可 靠地与周边设备和上位机进行信号与数据的交换,实现现场网络化控制;也可以通过软 件编程,设定并灵活地优化不同的运动路径,实现现场不同生产产品型号的搬运作业要求。 并通过以上介绍的通信方式,可实现远程控制生产。
在成本控制方面,机器中不断加入新的科技成果。比如:通过采用 2D(2 维平面)和 3D (3 维立体激光)视觉系统,机器人可以自动识别被抓取物的位置,使得码垛作业更为灵活, 减少了产品输送带定位设备和人力的成本支出。
| 序号 | 名称 | 型号及规格 | 数量 | 备注 |
|---|---|---|---|---|
| 1 | 机器人系统 | |||
| 1.1机器人本体 | M-20la | 1 | FANUC | |
| 1.2机器人控制柜 | M-20la | 1 | FANUC | |
| 1.3示教编程器柜 | M-20la | 1 | FANUC | |
| 1.1机器人本体 | M-20la | 1 | FANUC | |
| 2 | 来料输送线 | 1 | 沈阳天宝 | |
| 3 | 托盘输送线 | 1 | 沈阳天宝 | |
| 4 | 安全围栏 | 1 | 沈阳天宝 | |
| 5 | 电气系统 | 1 | 沈阳天宝 | |
| 6 | 视频监控系统 | 选配 | 1 | 沈阳天宝 |
| 7 | 扫码系统 | 选配 | 1 | 沈阳天宝 |
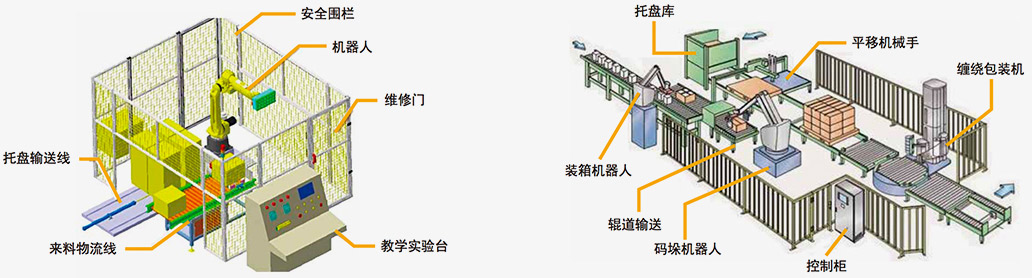
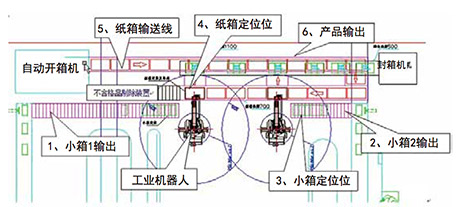
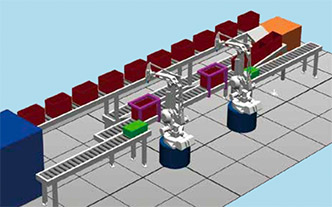
对某奶制品企业 2 条生产线的产品进行小箱自动装入大箱的工序,采用机器人来实现
